四川博尔特机器人科技有限公司
地 址:四川省泸州市高新区酒谷大道五段19号
联 系 人:陈经理
手 机:139-8272-1155
服务热线:+86-830-2986961
网 址:www.scboert.com
邮 箱:bobchen@scboert .com
什么是关节机器人?
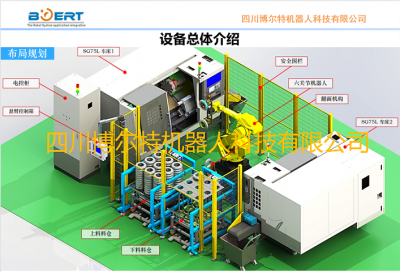
关节机器人(Robot joints),也称关节手臂机器人或关节机械手臂,是当今工业领域中较常见的工业机器人的形态之一。适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。
常见的六轴关节机器人的机械结构,六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。
采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。

六轴关节机器人关节设计
六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动。小型的六轴关节机器人的腕部关节主要采用谐波减速器。
对于复杂的整体叶轮等采用六轴联动机器人会更方便。混合型六轴联动机器人的结构形式由三个直线运动轴,两个转动轴和一个摆动轴组成。其中三个直线运动轴是典型的悬臂型直角坐标机器人,也可以是龙门式三维直角坐标机器人。在上下运动的Z轴下端带动一个旋转轴,旋转轴带动一个摆动轴,摆动轴末端再带动一个旋转轴。最末端的旋转轴带动手爪。由于两个旋转轴和一个摆动轴其实就是关节机器人的末端三个运动轴,所以六轴混合机器人就是三轴直角坐标机器人加上关节机器人的三个最末端运动轴组合而成。